



Your Path And Your Motion Planning
Your Path And Your Motion Planning | To solve the navigation problem in robotics, path planning—pure geometric planning from point A to point B is most usually employed. The path’s viability is then evaluated using motion planning. Robots are unlikely to follow a precise motion plan due to the uncertainty in actuation slippage. Velocity control errors that accumulate, and position faults that multiply. This is frequently taken care of by a high-level online planner, which monitors the development.
Its a process of constructing a route from a starting point to an endpoint utilizing a full, or dynamic map. Motion planning is the process used to determine the order of steps that must be taken in order.
Planning Your Path And Your Motion
Numerous approaches are used in the planning of an AV motion, many of which have their origins in the modelling of robot trajectory tasks. Planning for cars is different from planning for robots because vehicles are dangerous. High-speed sources of transportation, and their physical attributes have a big influence on how they interact with the road.
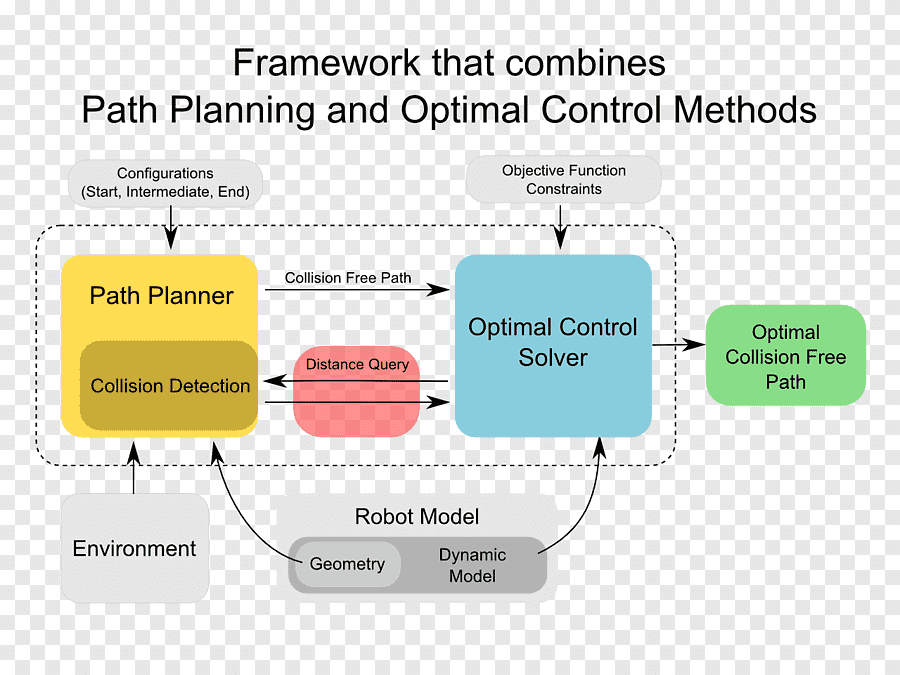
Another planning option is to look for continuous functions defined in the space domain based on the optimization. This process in the presence of geometric, kinematic, and physical restrictions regulating the interaction between the vehicle and the road. An optimal path inside the boundaries of the trajectory can have a considerably lower root-mean-square curvature than a trajectory built using midpoints.
Finding a track to follow, avoiding obstructions, and creating the optimal route that assures security, ease of use, and efficacy while transporting people or products from one region to another are all part of motion planning procedures. For self-directed on-road driving, this study intends to investigate existing approaches and evaluate a number of motion planning tactics, such as picking a lane, figuring out the safest move, and mapping the quickest route. Each of these strategies is critically evaluated in the study in terms of benefits and drawbacks.
Path planning functions similarly to the brain of a self-driving car. It is the process through which the vehicle decides how to move through its surroundings. In our self-driving car software stack model, it comes after localization and describes how the vehicle identifies its location.
Path planning and “motion planning,” as they are usually referred called, are the brains of a self-driving car. It is up to this section of the vehicle stack to decide how to move through the environment. Three essential sub-components of the process are prediction, behavior, and trajectory.
Comments are closed